Aggressive Quadrotors Part III
Planning and control for heterogeneous quadrotor teams in environments with obstacles. Work done by Daniel Mellinger, Alex Kushleyev, and Vijay Kumar at the GRASP Lab at the University of Pennsylvania. Smallest and biggest quads developed by Alex Kushleyev and Max Likhachev.
Apple News
- HzO 'Talking to Apple' About Water Blocking Technology for Future iPhones
- Apple explores 3D GUI in new patent application.
- Apple report reveals labor, environmental violations
- iPad 3 production already underway: March 2012 launch likely.
- Chinese pelt Apple store with eggs for refusing to sell new iPhones
- Apple loses first round in ITC case againstMotorola
- Next-gen iPhone, iPad could deliver 20 times the graphics power
- Apple Aims to Take On the Textbook Market
- Apple is right where it needs to be at CES
- Is the iPad 3 at CES?
- Next generation iPhone and iPad could offer 20 times more graphics performance
- Apple scares TV manufacturers into Google's open arms
- Apple CEO's Stock Awards Lift Compensation to $378 Million
- 300 Workers Threaten Suicide at Foxconn
- Show loses mojo as Apple rivals look beyond Vegas razzmatazz
- CES 2012: Apple’s mystery TV is year’s hottest phantom gadget
- Windows ultrabooks: What's Apple response?
- Look out, Microsoft--Apple is grabbing more IT dollars
- Apple's iPhone 4S sets ground for future growth
- Apple iTV 50 and 42-inch models tipped
- Samsung borrows Apple actress for Android tab ad
- How much do the Chinese love their Apple iPads?
- Apple exploring fuel-cell-powered MacBooks
- HTC says Apple patent workaround ready
- Apple's Patent Win: Just a Feather in Its Cap?
- Apple Plots Its TV Assault
- Apple's product roadmap points south
- iPhone, iPad Processors Outsourced To... Texas
- Apple Gives Siri Hackers a Break
- Walter Isaacson Considering Expanding Steve Jobs Biography
- 'Find My Car Smart' is the First Low Energy Bluetooth App for iPhone 4S
- Carrier IQ Faces Federal Probe
- Why Apple is buying Anobit
- Three page Apple founding contract sells for a cool $1.59 million
- The Carrier IQ Controversy Continues
- Apple loses iPad trademark case in China
- Apple's internal employee social media policies leaked
- Apple iPad sales worries appear overblown
- Apple to Add 4G LTE to IPhone 5, IPad 3
- World's biggest Apple store opens next week in New York City
- RIM Tumbles as Sales Shortfall Signals Apple Is Extending Lead.
- MTA on State Investigation of Apple Grand Central Terminal Deal: 'Bring It On'
- Apple Stopped Supporting Carrier IQ in iOS 5, Complete Removal Coming in Future.
- iPhone buyers break their contracts to get latest model
- Carrier IQ Logging Software Found on Many Mobile Phones
- New Apple Board Member Bob Iger Buys $1M In AAPL Shares.
- How Apple’s Grand Central Station Store Is Screwing New York
- Report: Apple’s Finally Going 4G with iPhone 5 and iPad 3.
- HP’s Meg Whitman Acknowledges Apple Could Surpass HP In 2012, Says 2013 Will Be HP’s Year
- Apple posts Black Friday retail record, report says
- Apple ’76 Founding Contract Signed by Jobs Could Fetch $150,000.
- Apple iTV in 2012 with Sharp screens says analyst
- iPad 3 could make Apple the world's top PC vendor next year
- Apple’s biggest store ever to be revealed tomorrow in Grand Central Station
- George Clooney, Noah Wyle Battling to Play Steve Jobs in Biopic
- Occupy Flash movement wants Adobe's plug-in dead
- iPhone 4S faces crisis as iOS update brings a mountain of issues.
- Steve Jobs Envisioned Using Unlicensed Wi-Fi Spectrum for Apple Mobile Phone Network
- Apple's 2012 plans: iPhone, iPad, MacBook Air.
- The iPad app developer aged just TWELVE who has set the tech world alight with amazing talk unveiling his creations
- Get Ready for an iPad Price Cut.
- Swivl automated camcorder mount will follow you anywhere
- Source Claims Hands-On Experience with iPhone 5 Prototype.
- Logitech Acknowledges Google TV Set-Top Box a 'Big Mistake'.
- Smaller SIM Card Standard Could Be Ready Next Year.
- Original iPod Nano recalled by Apple in USA
- The 6 pillars of Steve Jobs' design philosophy.
- Apple's iPhone 4S Battery Troubles Now Joined By New Problems
- One in five Chinese wants a Mac, Morgan Stanley says
- iOS 5.0.1 making iPhone battery life worse instead of fixing it.
- Apple selling unlocked, contract-free iPhone 4S
- What Did Apple Win With the Demise of Mobile Flash?
- Isaacson: Here's What Steve Jobs Told Me About Building An Apple Television
- iPad 2 a week in: Not missing Android at all
- iPad 3 release date ushers in HTML5 internet era as Adobe knifes Flash.
- Apple agrees to replace dodgy MacBook power cords Be frayed, be very frayed
- Why Apple can't keep the iPhone 4S on the shelves.
- The Long National Mobile Flash Nightmare is Over.
- Nook Tablet vs. Kindle Fire vs. iPad 2: Review roundup
- Apple notifies faulty MagSafe owners of class-action settlement.
- Mobile Flash Abandoned for HTML5: Adobe Surrenders, Apple Wins?
- Amazon buys voice recognition startup Yap to counter Apple's Siri
- Apple's Steve Jobs vindicated as Adobe kills mobile Flash
- So Now What Will iPad Rivals Say in Their Commercials?
- Apple iPad 3 to get dual-LED light bar technology?
- Retina Display for iPad 3 would enable precision required for pilots, doctors
- iPhone case has a built-in projector
- Apple’s solar farm rumored to work with Leaf Solar
- Beyond the Steve Jobs Bio: More Stories on the Creation of the Mac
- Security Researcher Reveals iOS Security Flaw, Gets Developer License Revoked
- Settlement Reached in Lawsuit over Frayed MagSafe Connectors
- Apple killing Google Android where it counts.
- Apple: 3 Long-Term Weaknesses
- Apple boots security guru who exposed iPhone exploit.
- The help desk answers your questions: Apple iPad 2 may be the tablet to beat
- From the back of a garage to the big screen: 'Lost interview' with late Apple visionary Steve Jobs to air at theaters
- iPhone 5 release date leads 2012 charge as iPad 3, iPod touch 5 linger.
- Overhaul of All Apple Products Expected in 2012.
- Apple security chief 'leaves' after lost iPhone flap
- Apple leaning towards dual LED light-bars for iPad 3's Retina Display
- Apple iPhone 4S BatteryGate: Gripes Continue.
- Are Operations Apple's Secret Sauce?
- From the back of a garage to the big screen: 'Lost interview' with late Apple visionary Steve Jobs to air at theaters
- Apple Fixing iPhone 4S Battery Problem, Other User Issues
- Why I bought an iPad 2
- Apple TV deal failed because of ad share tips CBS CEO
- Apple's New Fifth Avenue Store Cube Fully Revealed
- Apple stockpiling 2M third-gen iPad units by end of 2011.
- Case-Mate Introduces Tank, A "Military-Grade" iPhone Case
- Apple iPhone 4S / iOS 5 battery-life bugs admission
- Apple feels no heat from Kindle Fire
- Why can't Apple get iPhone's design right?
- You can have iPhone 4S, I'll take Samsung Galaxy S II.
- APPLE: The Kindle Fire Is Good For Us Because It's More Android Fragmentation
- Apple’s iTV, Steve Jobs’s last project, may transform home entertainment.
- Apple remains top US smartphone maker as iPhone holds 28% share.
- Siri nibbles away at iPhone data plans
- An Apple A Day: Bullying And Steve Jobs
- Small Spanish Firm Defeats Apple in iPad Patent Case
- Apple CEO Tim Cook makes some changes
- Samsung to depose Apple's iPhone designers, including Jony Ive.
- iPad vs. Everything else
- Apple kills the Mac Pro? It doesn't matter
- iPhone 4S real-world data speeds: What Siri won't tell you
- Skinny iPad 2 case puts keyboard on a diet.
- Kindle Fire or iPad 2?
- Apple genius: 'Turn off your phone' for better battery life
- Apple retail chief Ron Johnson officially departs with no replacement
- Apple now has third piece of mapping puzzle, but what's the full picture?
- Next version of Mac OS X already undergoing testing
- Apple's Siri Speaks Also on iPhone 4, iPod Touch 4G
- For the good of the company? Five Apple products Steve Jobs killed
- Apple iPhone 4S Battery Drain: Guessing Game Continues
- Apple's App Store > SHAME (in-App purchases)
- What’s Really Next for Apple in Television
- IT still hating on Apple: 41% block employee-owned Macs
- Apple's Siri Speaks Also on iPhone 4, iPod Touch 4G.
- The bloody incredible iPad Halloween costume.
- Steve Jobs’s last words: ‘Oh wow. Oh wow. Oh wow.’
- Every Android Device Now Infringes Apple Patent
- Unlike Apple's iOS, Android phones not getting updates
- Apple exploring 3D gestures to control devices from a distance.
- How Apple Can Clean Up in the Living Room
- Apple Pumps Sunlight into iCloud Data Center.
- Apple Awarded Second Slide-to-Unlock Patent, Targeting HTC?
- Amazon's Fire Already Disrupted My iPad Purchase
- Apple to Start Television Revolution, Analyst Says
- Steve Jobs: HP Implosion was an iTragedy
- New iPhone launch turns into remembrance for Jobs
- iPhone 5 was Steve Jobs’ last big Apple project.
- Steve Jobs and the 7 Rules of Success.
- Apple iPad's Reign as Top Tablet Won't Last Forever: 10 Reasons Why.
- Biography sheds new light on Steve Jobs' life
- Siri Co-Founder Quits Apple
- Grand Theft Apple: Steve Jobs Declared War on Android.
- Jobs 'annoyed and depressed' following iPad announcement, biography reveals.
- Jobs questioned authority all his life, book says.
- 150 years ago, a primitive Internet united the USA
- In tablets, Android's star is rising but...
- Why Apple Isn’t Going to Release a 7-inch iPad
- Enterprise users prefer Apple as iPhone, iPad reign over Android
- Apple's Siri Shuns 35 Million Americans—Are You One?
- Why Apple's big miss doesn't matter
- Apple sets iPad, Mac sales records
- Apple iPad: Stronger Than Ever
- iPad mini may be mini afterall
- Apple's Profit Climbs 54%, but iPhone Sales Disappoint
- Samsung’s Galaxy S II Beats the iPhone 4S — At Least When You Drop Them
- Apple offers first-generation iPad at cut-rate prices
- 'iPad Mini' Rumors Revived with Claims of 7.85-Inch Screen
- Chinese Factory Shutdown May Affect Apple Notebook Supplies
- Dropbox Indeed Balked at Major Acquisition Offer from Apple
- Steve Jobs, Apple inspiration for one-man show
- Odor From Apple Supplier Factory in China Unbearable, Residents Say
- Samsung Wants Apple iPhone 4S Banned in Japan, Australia
- Apple Sells More Than 4 Million IPhone 4S Units in Debut Weekend
- Mike Daisey goes after Apple, the late Steve Jobs
- BlackBerry Outage Is Another Black Eye for RIM
- Scott Forstall, the Sorcerer's Apprentice at Apple
- Apple iPhone 4S Is Here: Ask Us Anything
- iPhone 4S Seems to Fix 'Death Grip' Antenna Issue
- Apple Will Start Production on the iPad 3 Soon
- Steve Jobs - Biography
- 'iPhone 5' Case Gamble
- Apple Co-Founder First in Line for New iPhone
- Apple publishes guide on how to set up iCloud
- Battle Between Samsung and Apple Heats up
- Run Microsoft Office on Your iPad Faster: Cisco Hard-wires Xen
- An Apple A Day Has Passed Away. But Steve Jobs Left A Basket Full Of Legacy
- How Steve Jobs Transformed the Home
- Design Spotlight Is Thrown on Ive
- Dispute Over Apple Image Shows Internet's Reach
- Facebook iPad app 'full of bugs'
- Tablet app brings new touch to Braille
- Apple to Launch 'iPad Mini' in Early 2012?
- Apple iPhone 4S review: It’s the software that’s a surprise
- Steve Jobs' black turtleneck reportedly explained in biography
- Steve Jobs's unintentional legacy: The consumerization of IT
- Steve Jobs: Informed by his era
- Hong Kong student's Apple tribute is Internet hit
- Americans recall personal impacts of Jobs' vision
- Dropped from App Store, Siri Assistant to stop working Oct. 15
- Read 17 touching Steve Jobs tributes from Lucas, Lindelof and more
- Defending Life’s Work With Words of a Tyrant
- iPhone 4S sticks with 512MB of RAM, reports say
- The future of cloud computing: 5 rainbows, 5 thunderheads
- What’s Next for Apple?
- Apple's Rise Is China's Rise
- 1 million iPhone 4S pre-orders in 24 hrs, small screens be damned
- Steve Jobs left plans for more Apple products
- For Stanford grads, Jobs' commencement speech in 2005 was life-changing
- Radiation detector for iPhone prepares you for a nuclear meltdown
- 'It's just not the right time': Steve Jobs' death leads Google and Samsung to delay the launch of Ice Cream Sandwich android system
- How to Spot a Free iPad Scam Profiting from Jobs' Death
- Is Apple's App Store a cellular data hog?
- 12 gaming-changing Apple patents we'd love to see in the iPhone 5
- Teardown of Apple's Thunderbolt Display finds same LG panel used in 2009 iMac
- Apple iPhone5: Top 10 Most Wanted Features
- 31 percent of Android users eyeing switch to iPhone
- Apple 'gearing up' to release devices with curved glass in 2012 - report
- Apple Trims Orders for IPad Parts: JPMorgan
- Apple exploring universal power adapter, data/charge cable for iPhone & Mac
- Some iPhone 5 panels have defect, report says
- Apple's Xcode supports quad-core ARM CPUs for future iPhones, iPads
- Hong Kong's 1st Apple store mobbed on opening day
- VIA Seeks to Ban iPad, iPhone in U.S. for Patent Infringement
- Apple to sell 149 million iPads in 2015, researcher says
- Apple’s A4 and A5 processors under fire in new lawsuit
- Apple wins 40 patents in China
- Apple Can Run To $510 With iPad Market Share Momentum
- Apple’s Next Event to Be Held on October 4, Starring Its New CEO
- Unreal Engine 3 Comes to the Mac Platform
- T-Mobile USA 'Not Going to Get the iPhone 5 This Year'
- Apple Releases Major Update and Free Trial for Final Cut Pro X
- Sony Designs Tablet That's Not an iPad Wannabe
- Apple releases more EFI firmware updates
- Google CEO says he “couldn’t stand” being on Steve Jobs’ Apple Board
- Apple's design wizard has not left the building
- iPhone 5 rumor roundup
- iPhone 5 Prototype Left in a Tequila Bar: Apple's Marketing Brilliance
- How Steve Jobs Shaped Apple’s Dark Side
- The iPad wars: HP TouchPad sale burns Apple's foes
- Stanford Archives Document the Early Career of Steve Jobs and Apple
- Woman Gets Duped Into Buying Wooden Apple iPad for $180
- The iPad takes on manufacturing
- Apple's iPad will only get more popular, analyst says
- Samsung to Apple: Kubrick made first iPad
- What would you like to see in Apple's new Macs?
- Apple’s iPad Already Replacing Cash Registers by the Bushel
- United Airlines Deploying 11,000 iPads to Pilots as Electronic Flight Bags
- Bad News About $99 HP TouchPad Mania
- TouchPad's demise a cautionary tale for iPad competitors
- Apple Wants to Drop iOS Tracking Tool
- HP single-handedly destroys non-iPad tablet market
- Apple iOS 5 features earthquake warnings for Japanese iPhone users
- HP To Apple: You Win.
- iPad 3 Coming in Early 2012 [REPORT]
- Will the iPad 3 Have a Futuristic OLED Screen?
- Google-Motorola Deal Positive for Apple; iPhone Maker to Strike Back
- What the iPhone 5 Might Look Like
- Apple isn't just resurgent, it's taking over
- Santa Monica Apple Store with glass roof given swift approval
- Apple seeks ban on all Galaxy smartphones, tablets in EU
- Apple's iAd Chief Joins Venture-Capital Firm
- Tablet Buyers Only Want the iPad, Report Says
- Griffin Launches $49 iOS-Controlled Helicopter
- Photo of Possible iPhone 5 Display Assembly Production Surfaces
- Don't be so quick to buy that tablet; other options coming soon
- Samsung's iPhone Killer Is Coming: Galaxy S II Due This Month
- Apple iPhone 5 Announcement May Come Sept. 7: Report
- Fake Apple Store Is Now The “Smart” Store
- Apple Patent Filing Could Put Plan and Carrier Changes In Your Pocket
- Apple Patent Watch: Pico Projectors and 'Schematic Maps'
- OS X Lion Will Terminate Apps You Haven't Used In A Few Minutes -- Here's How To Prevent It
- This Could Be What Apple's iPhone 5 Looks Like
- Apple execs: Cheap iPhone only an option as a “category-killer”
- Apple eyes phallic iPhone, iPod charger
- Find My Mac is reason enough to sign up for iCloud
- Apple seen merging iOS, Mac OS X with custom A6 chip in 2012
- The Ipad is a most efficient tablet
- Analyst: 'Premium' iPad 2 coming
- iPhone Owners Twice As Loyal As Android Fans
- Apple manufacturer to replace some of workforce with robots
- Why On Earth Would Apple Release An iPad 3 This Year?
- How Apple is sucking the profit out of the mobile phone market
- iPhone 5: Why Rivals Should Be Worried
- Can you bring a goat into an Apple retail store?
- Apple's Grand Central store would be its cheapest in NYC
- Is Apple giving the MacBook Pro a slimmed-down makeover?
- Students are willing to give up sex for an Ipad
- Rumor: iPhone 5 to Touch Down in U.S. on Sept. 5
- New Apple Macbook Hack Targets Battery
- This Is Amazon's New Way Around Apple's App Store Subscription Rules
- Two fake Apple stores closed in China, report says
- Apple orders 15 million iPhone 5s
- Apple iPad 3 in 2011? Try 'iPad 2 Plus'
- Apple developing fixes for dangerous iOS vulnerabilities
- Phone helps 'combat' diabetes, anemia
- Police to begin iPhone iris scans amid privacy concerns
- Verizon CEO 'assumed' Apple would release new iPhone in early summer 2011
- Apple considering Hulu bid
- 95 percent of enterprises choose iPad over Android
- Apple unveils first Thunderbolt display for $999
- Apple's iPad Cannibalizes Mac Sales, Too
- Apple adds Core i5, Thunderbolt to MacBook Air
- Apple's corporate iPhone, iPad app strength bad news for rivals
- BBEdit 10 brings more than 100 enhancements
- Apple Doubles Profits with iPhone and iPad Sales
- New Mac mini lacks optical drive as Apple continues to ditch the disc
- Apple Seeks to Broaden iPhone in China
- Report: Samsung, LG vying to make iPad 3 display
- Apple Shares Soar to New All-Time High
- Apple reportedly testing iPad 3 2048 x 1536 displays from LG and Samsung
- Apple to sell contract-free, $350 iPhone, report says
- iPhone 4 survives fall from skydiver's pocket
- ChangeWave Research Releases Apple vs Google Android Report
- iOS 4.3.4 Jailbreak released just days after Apple closes loophole
- Apple heavily discounting iAd pricing
- Apple iPad Accounts for One Percent of Global Web Browsing
- Is Apple Buying Up All the Parts for Amazon's Tablet?
- Apple's iPhone growing, Android flat as smartphone sales surge
- Samsung Seeks Ban on Apple Products Sale in U.S.
- No Apple iPhone 5 or 'Baby' iPhone Until 2012, Wall Street Says
- Samsung launches ITC complaint against Apple
- Apple iPhone 5 - Top 3 new Android smartphones that can beat iPhone?
- Apple Bewilders Final Cut Pro X Users - Refunding Disappointment
- Symantec: Smartphones more secure than PCs
- Mac OS X update supports SSD optimization
- Hacker group says Apple developer site susceptible to phishing hacks
- Apple is building two (!) iPhones for September release
- Apple’s Final Cut Is Dead. Long Live Final Cut.
- Hands On: Apple's Final Cut Pro X
- Skype video chat on iPad app moves Microsoft closer to Apple
- Apple supply chain points to "iPhone 4S" in Sept., iPad 3 prototype in early 2012
- Apple ditches Samsung, moves A6 processor production to TSMC for iOS 6 devices?
- Conan O'Brien rips Apple's Final Cut Pro X on show
- iCloud's senior product manager departs Apple
- Apple iCloud vs. Google Music vs. Amazon Cloud
- Apple Cracking Down on Jailbreaks, Downgrades in iOS 5?
- Third-gen iPad, 4G LTE iPhone 'more likely' to come from Apple in 2012
- Enterprise Mobility: Apple iPad 2 Rivals: 10 Tablets That Can Challenge the Market Leader
- Has Apple dropped Samsung as its iPhone processor manufacturer?
- IS APPLE'S 'SPACESHIP' CAMPUS TOO FAR OUT?
- Apple gets OK to bid on Nortel patents
- Comscore: iPads are 97 pct of U.S. tablet Web traffic
- Apple Can Withstand Retail Guru's Exit
- Apple Is Now Selling Unlocked iPhones In The U.S. – Will Consumers Also Unlock Their “iWallets”?
- Apple sued over its use of iCloud name by iCloud Communications
- Apple sued over its use of 'iBook'
- Apple Files Patent That Could Restrict iPhone Camera Use at Concerts
- Apple’s AirPort Utility update alludes to next-gen AirPort Extreme, Time Capsule
- Meet the man who wants an Apple retail union
- In iOS 5, what derailed deep Facebook integration?
- Apple Stores' Secret Sauce Spilled
- Rumor: Unlocked iPhone 4 to hit U.S. this week
- Apple iOS Overshadows Android in WWDC, Google I/O Market Statistics
- Apple offers free Lion upgrade for new Macs
- APPLE'S NEWLY PLANNED HEADQUARTERS IS PENTAGON-BIG
- Why Copyright Holders Love iTunes Match And Pirates Hate It
- How iOS 5 Affects The Entire Mobile Industry
- Apple iCloud: Steve Jobs' own private internet
- A first look at Apple's new spaceship-like headquarters
- How the Carriers Can Fight iMessage
- Cloudy Days for Apple's iTunes
- Apple iCloud Purchasing First Look
- Apple releases iTunes 10.3 with iCloud beta
- How well does iOS 5 run on iPhone 3GS?
- How to upgrade to OS X Lion
- iOS 5 unveiled: here are the new features to be excited about
- Apple Delivers Another Slap to RIM’s Face With iMessage
- Top 10 New Features on Mac OS X Lion - $29
- TuneCore CEO: Apple Has Just Monetized Pirated Content
- Apple Preps ICloud, U.S. Military Beefs Up for Cyberwar
- Apple Preview: Mac OS X Lion Ready To Roar
- Apple Hires The Guy Who Hacked Together A Better iOS Notifications System
- $15 Program Tracks Stolen MacBook, Nabs Thief
- Apple iCloud: 5 Burning Questions
- iPad forcing rival tablet makers to cut back
- The leaked Apple iSO 5 interface shows flexible design, iPhone 5 may go this way [PICTURES]
- Chinese teenager sells kidney to buy an Apple iPad 2 and iPhone
- Alaska Air To Use Apple's IPads To Replace Paper Flight Manuals
- Apple Is Cracking Down on Free iPad, iPhone Giveaways
- How Apple's iCloud Will Rain On Google's Parade
- Apple finally going after ipods.com domain
- Top five Steve Jobs keynotes of the past decade
- Why Windows 8 fails to learn the iPad's lessons
- Apple's giant data center pops up on Google, Bing
- 4th Time a Charm for Apple? From iDisk to .Mac to MobileMe to iCloud
- Steve Jobs is back — for now, anyway
- What to Expect From Apple’s OS X Lion, iOS 5 and iCloud
- Apple's First CEO Says Steve Jobs Was Even 'More Particular' Than Today
- Remains of the Day: Killer design
- ScreenFloat 1.1.1
- Intel Expresses Interest in Making Foundry Deals to Produce Custom Chips
- Google Announces Major Push Into NFC Payments With Google Wallet
- Another touch sensor maker will join Apple's list of iPad 2 suppliers in June
- Analysis finds OLED display unlikely for Apple's third-gen iPad
- Four Ways to Make Your Battery Last Longer
- Apple investors brush off China blast impact
- 'Combustible Dust' Plant Explosion May Cost Apple 500,000 iPads
- Will other stores follow Apple's new iPad interactive display model?
- Apple gadgets gobble 80 percent of mobile video
- Apple’s 500,000 Approved iOS Apps by the Numbers [INFOGRAPHIC]
- iPad factory explosion kills three, could cost Apple 500,000 tablets
- Square Debuts Point-of-Sale Support for Apple iPad
- Explosion at China iPad factory shows supply risks
- Will Grand Central Terminal Be Home to New York's Next Apple Store?
- Apple to Dominate Cloud Music?
- 8 Likely iPhone 5 Rumors, and 2 Wild Ones
- Inside the Apple iPad factory
- Apple to Introduce a Curved-Glass iPhone 5?
- PlayBoy launches uncensored iPad app, evading Apple's eyes in the process
- 10 years later, Apple's 'crazy' retail gamble is a hit
- Behind Google's tablet war with Apple
- Apple Creating an Even Smaller Micro SIM Card
- Patent Troll Lodsys: All We Want Is 0.575% Of The Entire Mobile In-App Payment Ecosystem, Is That So Wrong?
- Apple pushing for smaller SIM card standard with Orange's backing
- Apple iPhone 5 Offers Edge-to-Edge Screen, Shifted Parts: Report
- HP exec dismisses Apple and Intel's Thunderbolt in favor of USB 3.0
- Rumor: Apple Hosting Special Retail Event this Weekend
- Apple's iPhone 5 Carried by Sprint, T-Mobile: Report
- What was the first Apple Store like?
- Are Leaked iPhone 5G Cases a Sign Apple is 'iPad-izing' the iPhone?
- Why Apple, Google, Microsoft won't streamline video chat
- EXCLUSIVES Apple planning major product launch for 10th retail anniversary?
- The Danger of Playing in Apple’s Walled Garden
- Nuance Brags Amid Talk of Apple Deal
- Senators press Apple, Google for answers about location tracking
- Apple Pays Compensation after iPad Fight at Beijing Store
- Apple using Nuance voice tech in data center
- Fortune’s "Inside Apple" Shows Apple’s Inner Workings
- Violence Breaks Out Saturday at Beijing Apple Store
- Apple closing in on Nokia as world's top smartphone vendor
- Apple issues several Thunderbolt-related updates
- Apple Releases iOS 4.3.3 With Location Fixes
- Apple to snare 76% of year's mobile app revenues
- Lawsuit accuses Apple, others of 'conspiring' to keep employee wages low
- Why Apple — Not RIM — Is Poised to Own the Mobile Enterprise
- Apple to release Mac OS X Lion through Mac App Store - sources
- Apple will miss Steve Jobs’s guts
- Teardown of Apple's 21.5-inch Thunderbolt iMac finds removable graphics board
- Apple still dominates in app market, despite Android growth, report says
- Apple's new Thunderbolt iMacs include unreleased Intel Z68 chipset
- Competitors to Apple's iPad risk issues with excess inventory
- Nortel Wins Court Approval to Auction 6,000 Telecom Patents
- Untethered Jailbreak For Verizon iPhones Is Ready To Go
- Apple: MEM’s The Word
- pple to address iPhone location concerns with quick release of iOS 4.3.3
- Intel Should Be Apple’s Chip Foundry, Analyst Contends
- Why Apple Paid $4.5 Million for iCloud.com?
- Apple releases third build of Mac OS X 10.7 Lion Preview 2 to developers
- Apple, Google to testify at Congressional hearing on location tracking
- Apple Location-Tracking Drama Extends to Carriers, Prompts Hearing
- Microsoft’s Quarterly Profit Falls Below Apple’s for First Time in 20 Years
- Did Apple spend $4.5 million to name its cloud storage service iCloud?
- Transparent rear panel puts iPhone 4's guts on display
- Apple May Launch White iPhone 4 on April 27
- Smartphones like Apple's iPhone hold treasure trove of data on users' lives
- Apple makes record $11B in purchase commitments, earns its highest margins in Asia
- iOS location data prompts investigations of Apple in South Korea, Europe
- Apple Data Centers Use Least Clean Energy, Yahoo! Most, Greenpeace Claims
- Apple starts squeezing pay-per-install apps
- China is Apple's fastest growing market for iPhone
- Apple tops Nokia to become world's largest handset maker by revenue
- Is Samsung's Galaxy S Really One Big iPhone Copycat?
- Police use Apple iOS tracking data for investigations
- Disaster in Japan hasn't greatly affected Apple's supplies, COO says
- After iPad Sales Decline, Analysts Adjust 2011 Predictions
- Why Apple Tracks You Via iPhone: It's Not Why You Think
- Verizon announces 2.2M activations of Apple's iPhone in Q1 2011
- iPad Grabbed 85 Percent of Tablet Market Share in 2010: ABI Research
- Apple Will Introduce Smart TV Set, Analyst Says
- Apple's Final Cut Pro X, no longer 'hamstrung by 4GB of memory'
- Apple Unveils Final Cut Pro X
- Get a refurbished 16GB iPad for $349 shipped
- Apple publishes job posting for "Cloud Systems Software Engineer"
- Maine school district to spend $200,000 on Apple iPads for kindergartners
- Apple iPad 2 a Hot Ticket on Ebay
- How the iPad Is Emerging as a Business Tool
- Apple's OS X 'Lion' Offers Business-Friendly Multi-User Sharing: Report
- Apple, Intel work to prevent use of conflict minerals mined in Africa
- Apple's supplier audit finds underage labor & bribery, addresses suicides
- Apple's new iPad 2 ad: Technology is not enough
- Supplier indicates Apple will begin iPhone 5 production in Sept. - report
- AirPlay hack allows streaming to any computer
- Gartner: Apple to top tablet market through 2015; Android gains ground
- Apple sews up carbon fiber whiz -- could lighter devices be in the works?
- Introducing the free iPad 2 Starter Guide
- Apple's Final Cut Pro update rumored to add iPad, Thunderbolt support
- The day Fred Wilson dumped AAPL
- The underground iPhone: Million-dollar jailbreaking industry thrives on legal loophole
- Pandora, other app makers subpoenaed over user data collection
- What Will Apple Do With 12 Petabytes of Storage?
- Burglary Suspect Killed at California Apple Store
- Apple's Profit Margins Shrink as It Looks to Taiwan for Supplies
- Apple Releases Next Mac OS X Lion Preview
- Wireless iPad 2 screen sharing is much better than the wired variety - DIY
- Apple's iPhone 5 Delay Just Opened The Door For Google And Microsoft
- Microsoft Continues to Challenge Apple's App Store Trademark
- Nokia Sues Apple Again
- The Most Controversial iPhone Apps
- Is Apple Delaying the Release of iPhone 5?
- Apple campus evacuated after bomb threat
- No new iPhone hardware expected at Apple's software-centric WWDC - report
- AT&T Cracking Down on Unauthorized Tethering
- Happy Birthday, Mac OS X!
- Apple Sends Porn Company Cease and Desist Over 'App Store' Name
- Serlet Transition Out Appears As Natural As OS X Transition Towards iOS
- Senators call for takedown of iPhone apps that locate DUI checkpoints
- Apple's Jobs ordered to answer iTunes questions
- Apple Abandons Plans for Grand Central Terminal Store?
- Apple iPad 2 didn't impress this geek enough
- Steve Jobs, Apple CEO, captured looking rail-thin, sickly, in new photos
- How to Procure an iPad 2
- NFC: The Apple rumor that just won't quit
- Apple IPhone Software Loses Speed Test to Google’s Android
- Apple's WiFi iPad 2 said to record better sound than 3G models
- Steve Jobs Reaches Out to Apple Team in Japan
- Apple secretly stockpiling new iPad 2 shipments?
- iPad ‘Cads’ Scalping With Abandon
- Purported 'iPhone 5' cases show design near-identical to Apple's iPhone 4
- Apple Toned Battery to Create Slimmer iPad 2
- Apple Swimming in Sales as iPad 2 Supplies Run Dry
- Apple to the Core: iPad 2 Is a Dominator
- Deceleration in Foxconn manufacturing seen as a concern for Apple
- iPad 2 sells out in USA, March 25th international launch in doubt
- VMware View Client for iPad Brings Windows to Apple Users
- Could an Apple Magazine Template in iOS Change the Industry?
- Apple's Schiller: White iPhone will debut in spring
- http://www.wired.com/epicenter/2011/03/app-store-html5-slowdown/
- Apple Accused of Slowing Web Apps to Benefit App Store
- Apple offers original iPad donation program
- How to Switch from an Android Phone to the iPhone
- Apple trumps Nvidia in tablet gaming
- Apple Backs Up Its In-App Purchasing Ultimatum With iPad 2
- Analyst: 52M Tablets in 2011 – 75 Percent Apple’
- Apple iTunes takes just 4% of US digital video market as Netflix dominates
- Apple iPad 2 a Good Choice in Crowded Market: Consumer Reports
- Kevin Rose Hails Apple Japan Response
- Users complain iPhone clock bungles time change
- Making the iPad your only mobile computing device
- Apple's iPad 2: It's Still the One
- Survey: Apple's iPad fends off all comers
- IPad 2 sales to start with pre-dawn online orders
- iOS 4.3 code hints at A5 processor in next iPhone
- The Apple iPad 2 Gets Unboxed
- Apple iPad 2 Makes Moto Xoom Look Overweight
- Apple said to open temporary store at SXSW
- Cord Cutters: A First Look At MLB & NBA On Apple TV
- Apple Java Patch Kills 27 Bugs, Some Critical
- Apple's CDMA iPhone 4 to debut overseas in Korea on March 16, 2011
- Review: Apple's early 2011 Thunderbolt MacBook Pros
- Move Over, Apple! My Tablet Cost $200 - Nook Color?
- Apple patches critical Mac bugs with Java updates
- VMWare brings Windows to iPad as Apple readies iPhone 5
- Apple's Online Store Overhaul is Accompanied by Hiring Binge
- Apple iOS 4.3 reportedly available at 10 am PT today
- iPad 2 Coming to Target on March 11
- iPhone 5 to Get Aluminum Backing, Redesigned Antenna?
- AT&T to Permit Grandfathered Unlimited iPad Data Plans to Transfer to iPad 2
- Apple Looking to Develop iPhone Based on TD-LTE?
- Six reasons iPad 2 will be a huge success for Apple
- Apple iPads Invade Airline Passengers And Pilots
- Verizon iPhone 5 glass body style portended by white iPad 2 design
- So Far, Rivals Can’t Beat iPad’s Price
- Apple Gets Quietly Serious About Security
- Steve Jobs Wasn't Lying: Apple's iPad Market Share Was Really More Than 90% Last Year
- Apple iPad 2: 10 Big Questions
- Does the iPad 2 Have Enough Features to Keep Apple in Front?
- Conan O’Brien spoofs Apple iPad 2 event as "a little bit cocky"
- Is Best Buy Planning To Give iPads To All Its Sales Associates?
- Apple's iPad, other tablets, clobber PC market
- Apple adds SSD TRIM support to Mac OS X 10.7 Lion beta
- Apple slams Microsoft's 'App Store' challenge
- Apple's IPad 2 Reignites Post-PC Discussion
- Apple iPad 2: A Blessing in Disguise for Nvidia
- What Apple hopes you didn't notice about iPad 2
- Apple iPad 2 is geared to extend lead over Android tablets
- Mother Of All Android Malware Has Arrived
- Apple Offers $100 Refund for Recent iPad Purchases
- The Apple iPad 2: I Told You So
- Hands on with iPad 2
- When will Apple's stock split again?
- Apple’s iPad 2 Matches NVIDIA Tegra 2 Tablets with Dual Core Technology
- Storm : unleashed for the Mac
- Apple: iPad 2 is 'dramatically faster' (live blog)
- The iPad 2: Why Apple has finally convinced me to buy a tablet
- what's old might matter more than what's new
- Apple expected to ship 40M iPads in 2011, convincing iPad 2 mockup appears
- Apple strategy tax
- Apple MacBook Pro 13-inch (Thunderbolt)
- Former Apple Manager Pleads Guilty in Fraud Case
- Security firm details new Trojan written for Apple's Mac OS X
- Rumor: Apple Unveiling a White iPad?
- Apple's Oscar Hopes: What to Expect From 'iPad 2: The Sequel'
- Apple Will Send A Genius To Your Business
- 13" MacBook Pro specs leaked, reveal "Thunderbolt" I/O port
- FTC says it will look into Apple's marketing of in-app purchases to kids
- Apple reigns supreme in product placement
- Apple Confirms iPad 2 Event
- Apple invites media to March 2 event (consensus: iPad 2)
- What will Apple's future be without Steve Jobs?
- Apple may refresh iMac alongside new MacBook Pros
- What to Expect From the New MacBook Pro
- Apple iOS is tightly closed, Android is mostly open
- Apple succession planning key topic amid Jobs health worries
- It's time Apple came clean about Steve Jobs' health
- Report: Apple's iPad 2, iPhone 5 could be delayed
- Report: New MacBook Pro to Launch on Steve Jobs' Birthday
- What’s A Publishing App?
- New MacBook Pros Launch This Week, May Add Light Peak Connectivity
- Why iPad costs less than new rivals
- Regulators eye Apple subscription plan
- Apple to face CEO question at annual meeting
- Apple Stops Selling MacBook Pros, New Models Incoming On Thursday
- Apple reveals increasing child labor problem
- Next iPhone might be cheaper, but not smaller
- Reports of Apple Kindle App death are premature
- Glimpses of Apple's CEO Feeds Rumors
- New high-speed connection tech due from Apple
- Apple Patents New Method To Improve Battery Life
- WSJ Wrong, Apple Not Planning Smaller iPhones, N.Y. Times Says
- What it’s really like to work at an Apple Store
- New Shanghai store will be Apple's biggest retail venture in China yet
- Why Apple doesn't need an iPad 2
- Apple nixes child labor practices at Chinese factories
- Apple ties up 60% of touch panel supplies for 2011 iPad 2 tip insiders
- Apple adds copyright infringement to reasons for rejecting apps
- Antitrust fight against Apple's App Store rules faces 'steep' climb
- iOS jailbreakers thwarted by Apple's latest version of iBooks
- Apple’s iPhone 5 may sport a 4-inch screen
- Apple 2012: Making security sexy
- Mac 2011 vs. Mac 1981: Two views of Apple's future
- Apple to expand reach with new smaller iPhone, enhanced MobileMe
- Bite Out of Apple?
- Apple overhauling iPhone notification system?
- Steve Jobs 'Calling the Shots From Home'
- Sony: Publishers ‘Held Ransom’ By Apple, May Drop iTunes
- Apple rumored to update MacBook Air with Intel's Sandy Bridge CPU in June
- iPhone Nano Rumors Resurface: Apple's Answer to Android?
- Steve Jobs Spotted At Apple HQ Looking Healthy And Happy
- Apple TV iOS Gaming Clues Spell Trouble for Xbox, PlayStation
- Could Apple release two new iPads in 2011?
- iPad 3 rumors kick up in advance of the suspected iPad 2 announcement
- Apple opens up iPhone 4 orders, Walmart joins fray
- Apple surpasses Sony, Motorola in total handset sales - Gartner
- Enterprise Mobility: Verizon iPhone 4 Teardown Hints at Apple's Future
- Apple's New iPad in Production
- European newspaper publishers slam Apple on subscription sales
- Android, Apple iOS Lead 60% Increase In Smartphone Usage In US
- Apple Is Most Valuable Company on Earth: Analysts
- Apple's Special Weapon In Its iPad War Against Google
- Apple plotting new stores in Grand Central Terminal and Palo Alto
- Apple still owns movie downloads
- Apple may go all-digital on software sales
- Apple's secret iPad advantage: The supply chain
- iPad security: How a hospital group treated trouble
- Apple iPad 2 Rumors: Includes NFC, Carbon Fiber Body, 7-Inch Display
- European Newspapers Complain About Apple iPad Plan
- Android Tablets Beware: iPad-Style Success Takes a Sales Channel: Analyst
- Will Apple iOS 4.3 land Feb. 14?
- Apple's app store policies: What will they provoke?
- Amazon Could Be the Next Big iTunes Competitor
- Apple reseeds Xcode 4 golden master, removes Mac OS X 10.7 Lion reference
- Apple CEO Succession Proposal Gets Backing From ISS
- Apple Hints iPhone 5 Coming To Verizon In July
- iPad 2 Rumors Have Jumped the Shark
- New Apple iPad with front-facing camera spotted during News Corp event?
- Will Murdoch's Daily ever break even?
- If This Is Google's Best Shot At The iPad, Apple Shouldn't Worry
- Details of Apple's paid-subscription model visible in iPad terms of service
- If This Is Google's Best Shot At The iPad, Apple Shouldn't Worry
- Should The Daily worry about possible Apple bait-and-switch?
- European publishers feel 'betrayed' by Apple's iOS app subscriptions
- Clearing your iPad's memory
- Apple to start Verizon iPhone sales February 9
- Apple to Crack Down on Newspaper, Magazine App Payments
- Theft Ring Targeting Apple Stores Busted
- Apple Bringing Subscription-Style Billing To iPad Publishers
- iPad 2 screen revealed?
- Apple Releases IOS 4.3 Beta 3 for Developers
- NY Document: ID Theft Ring Targets Apple Stores
- Steve Jobs to Media Co’s: It’s My Way or the Highway
- Intel's Sandy Bridge issue could affect Apple the most
- Dirty Pool: Apple Trying To Steal Google's Android 3.0 Thunder
- Samsung Galaxy Tab has 16% return rate, Apple's iPad just 2%
- Global CIO: HP Calls Out Apple In CEO's Quest To Be Coolest Of All
- Liquid Damage May Not Kill Your Replacement Chances with Apple Products
- Apple Rejects Sony Reader App, Says Report
- iPhone vs. Android: Most profitable vs. most popular
- Apple Releases iOS 4.2.6 Ahead of CDMA iPhone Launch
- Apple hiring for iOS devices with LTE as a major factor
- Apple and Google have turned smartphone market on its head
- What's inside the iPad 2?
- Apple slips in mobile market, remains in top five
- Macworld without Apple focuses on add-ons and enhances for its products
- 13 reasons why software is not free
- Five coolest things I saw at Macworld 2011
- Apple vs. Google vs. Microsoft: Is the Windows era over?
- Apple Moves in on Your Wallet
- iPhone 4 owner sues Apple over cracked glass case
- Samsung will ship half its processors to Apple in 2011
- The Unlikely Story of Apple's iPad, One Year In
- Woman nabbed with 44 iPhones in stockings at Ben-Gurion Airport
- A loophole means unlimited data for AT&T iPhone
- Fresh Apple patent proposes 'hover' gestures for devices
- Google Chasing Apple in Smartphone, Tablet Popularity
- Netflix says Apple TVs streaming more of its movies than iPads
- Apple's Mobile Payment System Will Fail: Here's Why
- Apple now World’s Third Largest PC Maker
- Dead Space Just as Revolting on Apple's iPad, iPhone
- Apple surges, Android stalls in enterprise activations (report)
- Macworld 2011 Begins Today
- iPad Makes Apple Third-largest PC Maker, Canalys Says
- Mobile app revenue will triple to $15 billion this year, Gartner says
- Apple's online store reveals Verizon iPhone voice plans starting at $39.99
- Mobile Payments NFC : How Apple Could Steal A March On Nokia. Again.
- Steve Jobs Should Take A Cue From AIG's Cancer-Stricken CEO
- Apple On Cruise Mode To $418 With 10 Billion Apps Served
- Apple eyes pay-by-iPhone
- Apple-Loving App Developers Seduced by Android: Report
- Apple iPad in India on Jan 28; Will the Upcoming iPad 2 be Far Behind?
- Eastman Kodak Patent Death in Fight Against Apple & RIM
- Dead Space arrives to terrorize your iPhone, iPad
- Newest Economic Indicator: Companies Buying iPads
- Shake-ups at Apple, Google
- Security apps boost Apple as BlackBerry alternative
- Apple Investors Want CEO Succession Plan
- Apple's iPhone 5 Component Makers Change: Report
- What happens when the iPad outsells the Mac
- Phone font is what happens when you have way too much spare time
- Mac App Store = Death of current Web store
- Does Apple live up to the hype?
- Apple Hires NSA Pro David Rice as Security Boss
- Apple Using Cash to Secure Components
- "10 billionth app" Mom hung up on Apple
- Production of Apple's iPad 2 to begin in February, iPhone 5 in May - report
- Steve Jobs isn’t the answer to Apple’s tough questions
- Playboy on iPad Uproar Misguided and Uncalled For
- Reasons for Apple’s Greatness? How ‘Bout The Cook Doctrine?
- Apple responds to critics of Chinese working conditions
- Visual tour: Apple's greatest hits under Steve Jobs
- Apple responds to critics of Chinese working conditions
- Steve Jobs Is On Medical Leave; What’s Next for Apple?
- Apple maintains its sanctimonious streak by denying Playboy
- Apple Streams Into Social Media
- Chinese Environmentalists Dump on Apple
- Who Generates A Better Return On Capital – Goldman Sachs Or Apple?
- Apple Updates iPhone 4 Bumper To Work With Verizon iPhone
- $3.9 Billion Of Apple’s Massive Cash Reserves To Go Toward LCD Displays?
- Does Apple want to replace your mouse with an iPod Touch?
- 10 Reasons why Apple will be fine without Jobs
- Apple Is Right on Jobs Disclosure, Former SEC Chair Levitt Says
- Porn in Apple's App Store? Keep Dreaming
- Apple criticized for environmental, safety standards in China
- Apple Media Stream unearthed in new iOS beta
- Steve Jobs: The perspective of Apple analyst Tim Bajarin
- Android To Give Apple Tussle In Tablets
- Want To Top Apple’s All-Time Top Paid Apps List? Sell A Ton Of Apps — Or Do This
- Apple criticized in Chinese environmental report
- Steve Jobs and the miracle of Cupertino
- 14-Year-Old Designs Apple App that Knocks "Angry Birds" Off Its Roost
- Playboy's Pics Are Coming to iPad, Despite Apple's Anti-Porn Rules
- What Investors Can Expect From Apple's Cook
- White Apple iPhone Reportedly in Best Buy, Launch Feb. 27?
- Apple reveals top apps of all time
- Five lessons you should learn from Apple's $26.7B record quarter
- Apple COO: We're 'very confident' in Apple's future
- Apple needs to give Tim Cook the reins
- 'Playboy' for iPad could signal arrival of adult content on Apple's iOS
- Can Apple thrive without its visionary CEO?
- Apple's bright view outshines Jobs' plight
- Apple COO Tim Cook Dismisses Android Tablets As “Bizarre”
- Apple net income soars 78 pct in holiday quarter
- Apple Unlikely to Crash Without CEO Jobs
- Will Jobs' Departure Take A Bite Out Of Apple?
- Two men charged with hacking about 120,000 Apple iPads via AT&T servers
- Tablet market grows 45% quarter over quarter, driven by iPad
- Apple weighs on tech stocks, Dow holds gains
- Apple Shares Drop 5% Following Jobs’s Medical Leave
- Apple, AT&T Convince FBI to Charge Goatse Security
- Apple's Tim Cook called on to sub for Jobs again
- With medical leave, more questions about Jobs' successor
- BIO on Apple COO Tim Cook
- Apple Store Hit in Smash-and-grab
- Is a digital magazine storefront for the iPad on the way?
- Earnings preview: The iPhone vs. Android holiday scoreboard
- Apple CEO Steve Jobs takes medical leave of absence
- Is The Mac App Store the Kick Apple Needs?
- Rumor: Apple's iPhone 5 to sport new A8 processor, Qualcomm baseband
- Enterprise Mobility: Apple iPad 2 Design Wish List: 10 Must-Have Features
- News Corp., Apple Delay Launch of iPad-Only Paper
- Apple to celebrate 10 billion app downloads
- Rush to compete with Apple's iPad places strain on component suppliers
- Apple iPad Changes?
- 16% of ATT customers plan to switch to Verizon for Apple's iPhone - survey
- Apple on a win streak as rivals regroup
- Apple iPad, other tablets, blunt Q4 PC sales
- Apple Obtains Patent For Solar-Powered Devices
- Next-gen iPad and iPhone could lose the home button
- Tablets, the iPad, and the Frantic Cycle of Apple Imitation
- Apple's iPad having serious effect on PC sales
- Top 5 Discoveries In Apple's iOS 4.3 Beta
- Apple-Google Blood Feud Worsens
- Apple releases first beta version of iOS 4.3 to developers (Updated)
- GSM iPhone to gain 'Personal Hotspot' in March with Apple's iOS 4.3 - rumor
- Apple, Verizon Took Years to Overcome Their IPhone Differences
- Apple's CES absence doesn't blunt laptop presence
- iPhone 4 comes to Verizon (live blog)
- Apple's Steve Jobs to join Rupert Murdoch in unveiling The Daily on Jan. 19
- Apple to dump all restocking fees, say reports
- Apple don't need no stinking CEO succession plan
- Apple’s Jobs again takes symbolic salary of $1
- Apple not amused by Steve Jobs parody on Twitter
- Apple bans vacations and keeps seasonal staff for product launch
- Apple reached out unsuccessfully for new CFO-source
- Mac App Store Open for Business with 1000s of Apps
- Apple (AAPL) Could Fall Through $326.30 Support Level
- Skype for iPhone adds two-way video calling
- Bottom Five Apple Stories of the Year
- Apple Allowed Advertisers Access to iPhone, iPad Owners' Data
- Apple at top of list of targets for Trojans, botnets and hackers for 2011
- Apple works with tribe to put Cherokee language on iOS devices
- Apple Shares Hit Life-Time High, What Next?
- Skyfire iPad App with Flash Added to App Store
- Rovi buys Sonic, may affect Apple and DivX
- Apple's iPad Finds a Place in Business
- Apple positions iAd Producer as Adobe Flash alternative
- Sam's Club rumored to offer Apple's iPhone 4 at new low price of $147
- Apple is way ahead of other tablets in corporate sector
- Apple iphone 4 T mobile deals cheap iphones
- Apple, AMD and Dell data was leaked in insider trading scandal
- Nokia Sues Apple For Patent Infringement
- Apple updates AirPort Utility, Camera Raw, LED Cinema Display software
- Amazon MP3 swallowing heavy loss-leaders in fight for iTunes market share
- Apple bulking up iOS development team with navigation software experts
- Joint Venture Involving Apple and Microsoft Acquires Novell Patents For $450 Million
- Analyst: ‘Corporate Explosion’ of iPad Interest
- Why Apple's revenues grow nearly 3 times faster than its expenses
- Film 'Tron Legacy' will be Apple's only iAd on iPad until 2011
- Apple Accused of Selling Pirate Books On App Store
- Apple invests in Toshiba LCD plant
- Apple Bidding on Nortel 3G, 4G Patents
- Apple iPad Killing Newspaper Subscriptions: Survey
- Cydia App Store to Rival Apple's Mac App Store "Within Weeks"
- Apple disabled jailbreak detection API in iOS 4.2
- Apple juggernaut that none could stop in 2010
- Apple's iPhone could be last standing in smartphone 'race to the bottom'
- Apple gets booted Costco won't sell tech giant's goods
- Apple iPad 2 Tablet To Come In February?
- Apple drops appeal of $21.7 million OPTi patent suit
- iPad predicted to drive 50% of Apple's financial growth in 2011
- Why Apple won't rule the media world
- Upsetting The Apple Cart: Is iPhone Really Losing Ground?
- Xserve's death not a deterrent for many IT admins
- Apple patents glasses-less 3D projection
- Construction to begin on Apple Store in Bologna, Italy
- Apple awarded 3D patent, sure to revolutionize the iPad
- In battle of iPad vs. Android-based Galaxy Tab, 85% prefer Apple
- Intel, NVIDIA in settlement talks that may help Apple
- Apple's 'Kinected' Kitchen
- Hidden Dimensions
- Apple wins patent on glasses-free 3D technology
- Patent suggests Apple is mulling over glasses-free 3D
- 'Anti-Gay' iPhone App Pulled From Apple Store
- Apple Squashes Photofast’s MacBook Air SSD Upgrade Kit Business
- Apple Beefs Up Legal Team for Patent War
- Apple looks to take over the world with iPad
- Now playing in iOS Game Center: Your real name
- Apple I computer sells for $174K at London auction
- Nuance Shares Advance After Wozniak Mistakenly Says Apple Had Acquired It
- ITC to investigate Apple's patent case against Motorola
- St. Clair expands patent infringement claims against Apple
- Apple co-founder tells of the Android world we live in
- Apple co-founder: Android will dominate phones
- Apple antennagate scapegoat scooped up by Cisco
- Jobs’ team has passed on the responsibility for future versions of the OpenJDK to Oracle.
- Apple's Huge Software Update For The iPad And iPhone Could Be Coming Today
- Apple Macbook Air to get Compatible Adobe Flash
- Mimvi Launches Mobile App Search Engines for Apple iPhone, Google Android and Blackberry Smartphones
- Apple OKs Google Voice for iPhone after year-long eval
- Ex-Northrop Grumman CEO joins Apple board
- Apple director Jerry York, 71, dies
- Apple iPad a hit with corporate Australia
- Apple Releases Mac OS X 10.6.5
- Turn your iPhone 3g into an Android phone
- Apple's iOS 4.2 Update Boosts iPhone 3G Perfomance
- Apple sued for iOS 4 problems on iPhone 3G, 3GS
- Apple adds calendars back to iPhoto
- Apple working on MacBook Air display glitch fix
- Apple approves SkyFire iPhone browser with Flash video support
- Technological Triumph: Apple Lands on Top
- Apple Is Clear King Of Tablet Market, For Now
- MacBook Air a great Windows Netbook, for a price
- Free antivirus software for Apple macs
- Apple Taps Multi-Touch in Motorola Patent Lawsuits
- Apple's iPhone tops US smartphone shipments, but Android devices take 44%
- Apple issues Mac Pro EFI firmware, Logic updates
- Apple in trademark dispute over iPad name
- Apple shipping about 700,000 MacBook Airs, most wanted 11-inch display
- Apple counter-sues Motorola for patent infringement
- Mac App Store Provokes Developer Interest, Concern
- Apple partners with Unisys to reach enterprise, government clients
- Apple's Adobe Flash Battles Extend to New MacBook Air
- Revenue This Past Quarter By Over $4 Billion
- Apple Passes RIM in Global Shipments
- 'Back to Mac' details leaked in Apple forums?
- Jobs comes out swinging against Android, tablets
- Don't hold your breath for 7-inch iPad
- Your wish list for the Apple event?
- Apple Skipping LTE, Planning Dual-Mode 3G iPhone for 2011
- Apple Awarded Trademark for “There’s an App for That”
- Entrepreneur Takes On Apple And Wins $625 Million
- BofA Merrill, Oppenheimer raise Apple price target
- Next Apple iPad to have 7-inch Retina Display, 128GB storage [Rumor]
- Apple Rumored to Adopt Qualcomm Instead of Infineon for iPhone 5
- What the Apple TV costs Apple
- Competitors can't catch up to iPad
- Apple found liable in Cover Flow patent case
- Apple TV Still Looks Like a Hobby: 10 Reasons Why
- Apple Nears $300—But Investors Still See Upside
- Sintek Photonics Tipped As Potential iMac Touchscreen Supplier
- iPad trends may mean sleepless nights for PC makers
- iPad fingered in mini-notebook decline
- Apple TV Jailbreak: Imagine the Possibilities
- iPhone scalpers go nuts, forcing Beijing Apple store to close
- NVIDIA Settles Class-Action Lawsuit Over MacBook Pro GPUs
- Great, now Apple is invading my intestines
- Apple bites back at Nokia lawsuit
- Can HP Sway Apple's Tim Cook?
- Turn an iPod Touch into an iPhone with a simple case
- Apple Finally Acknowledges and Addresses ATI X1900 XT Issue
- Apple: Cook Not Going to HP
- Chinese Apple fans line up for iPhone 4 launch
- pple tops PetroChina in market capitalization
- Apple Manager Accused of Selling Secrets Tries to Post $600k for Bail
- Apple's relaxing of App Store rules has 'muted' effect on Adobe
- Seybold's Take: Can anyone outdo Apple when it comes to the iPad?
- Apple Rumored to Begin Production of CDMA iPhone in December
- Apple Customers Happiest Computer Users: Survey
- Will Apple win the Internet TV race?
- Secrets of Apple's customer success
- Apple iPhone Store Eclipses Android Market in Paid Apps
- Apple TV Runs iOS, Welcome Apps, Jailbreaking
- Apple’s iPad vs. Amazon’s Kindle: It’s On!
- Apple to add FaceTime to all Macs
- Apple Brings Its iPad to China
- App Store rules: Olive branch or air cover?
- Apple's new App Store rulebook (FAQ)
- Apple To End iPhone 4 Free Case Program
- The Battle Of Evermore: Apple vs. Google
- Apple Could Sell 28M iPads in 2011, Analyst Says
- iPhone 3G Doesn't Make the Cut for Apple's Game Center
- iOS 4.1 hands-on look
- Macworld introduces Macworld Insider
- 10 Things Steve Jobs Will Reveal
- Apple hiring marketing manager for iBookstore
- Can Apple maintain iPod's relevance?
- For Apple, It's Showtime Again
- Apple removes Boot Camp from OSX Server
- Apple releases Security Update 2010-005
- Apple Patent Filing Shows Touch-Enabled iMac, MacBook
- Why 'open' Android may lose the Apple iOS wars
- Apple exec stashed $150,000 in shoe boxes
- Apple iTV Will "Change Everything" Claims Digg founder
- Apple Files iPhone Anti-Theft Patent
- Apple patents Kill Switch for Jailbroken iPhones
- Apple's iPhone displays 55% of smartphone ads
- Inside Snow Leopard Graphics Update's surprising gains
- Apple Distributes Second Mac OS X 10.6.5 Build to Developers
- Apple to Shut Quattro Wireless Ad Network
- What will the next Apple TV be like?
- Apple Exec Accused of Accepting Kickbacks Pleads Not Guilty
- Apple iMac 27-inch review
- Verizon Introduces iPad App For FIOS TV
- Singapore's JLJ chair steps down amid Apple suit
- Apple's China contractor plans to hire 400,000
- Apple Notches 55% of Mobile Ad Hits, Android Gets 19%
- Apple Kickback Scheme Not Yet Singapore Investigation
- Apple's iAd Platform: Success or Failure?
- Papermaster left Apple over 'cultural incompatibility'
- Apple Licenses 'Liquidmetal' Supertough Alloy
- A glance at Apple's next iPad, iPhone chip
- Did Mark Papermaster, Apple iPhone exec, leave over 'Antennagate'?
- Apple Sues Over Power Adapter Knockoffs
- Consumer Reports confirms iPhone 4 signal problems are real
- Apple Making New Push Into China
- Apple looks to beef up its anti-fraud unit
- pple rules elite laptop list at Best Buy
- Apple Admits iPhone 4 Reception Woes Are Hardware-Related
- Here's What Apple's iAds Look Like (AAPL)
- Apple Bans iTunes Break-In Culprit, Just Don’t Call It Hacking
- Apple says iTunes Store hack damage minimal
- iPhone 4 with huge lens attached, but is it real?
- AT&T network glitch limits iPhone 4 upload speeds
- Apple's aluminum Mac mini and Mac mini Server (2010)
- Apple Bans Developer From Its Online App Store for Alleged Fraud
- Apple’s Clean Hands May Have Dirtied iPhone 4 Signal
- Apple Studies User Downloads to Fine-Tune Mobile Ads
- Apple bars a Dodgy developer
- Apple App Store and iTunes Accounts Hacked, say Reports
- Apple nixing iPhone 4 restocking fees...for now
- Apple `stunned' to find iPhones show too many bars
- Apple blames the software of the iPhone 4 for the signal issue
- Artist creates stunning portraits on his iPad
- Apple plans to fix iPhone 4's holding problem, but there's a big catch
- 3 shining examples of customer support that Apple could learn from
- Verizon gets the iPhone in 2011, for real this time
- $10/month Hulu Plus rolls out for iPhone, iPad, iPod, TV
- 2007 dock works better with iPhone 4 than the $29 new one
- Apple iPhone 4 Teardown Reveals $188 In Materials
- Apple May Have iPhone 4 Antenna Patch
- Apple's iPhone 4 Launch: As Sloppy As it was Successful
- iPhone 4 'most successful' Apple launch, sells 1.7 million in three days
- iPhone 4 haters, this one's for you: Will it blend?
- Early iPhone 4 owners in grip of reception problem
- FaceTime video quality sucks, but the experience still rocks
- iPhone 4 gyroscope adds extra dimension to killing games
- Top 11 complaints about iPhone 4
- Here's the best reason of all to get an iPhone 4
- Yellow blotches on your new iPhone Retina display?
- My wait for the iPhone at Apple's Fifth Avenue store
- iPhone 4's dark secret: poor left-handed calling?
- 5 Big Blemishes for the Apple iPhone 4
- iPhone 4 Arrives And Wall Street Can Barely Contain Itself
- Apple accuses HTC of iPhone tech theft (again)
- iPhone iOS4 software now available, download away!
- How iOS 4 can turn your iPhone into a Pocket Mac
- Apple is the new hacker bulls-eye
- Hackers say iPad has more security holes
- Apple's HTML5 Promotion May Backfire
- FBI investigating AT&T iPad security breach
- Do the feds have a case against Apple?
- The double-glass iPhone 4 is a shatter magnet
- AT&T Web site exposes data of 114,000 iPad users
- Got an iPad? Hopefully hackers don't have your email
- iPhone 4's 'Retina Display' claims exaggerated, says expert
- Apple's iAd service is like dealing with the devil
- Apple conference likely to yield new iPhone
- iPad came before the iPhone, Flash still sucks
- Apple's policies pushing web developers away from Flash?
- Apple reverses its "No cash for iPad" policy
- Jobs made phone call seeking return of lost iPhone
- Apple loses a second 4th gen iPhone, new insights discovered
- When did Apple become uncool?
- Verizon iPhone looks less likely for 2010 as details of AT&T deal unearthed
- Apple has a secret Flash replacement plan
- Apple Aims for iPad World Domination on May 28
- 5 Things Apple Must Do to Look Less Evil
- Netbook sales shrivel in face of Apple iPad
- Apple Sells One Million iPads
- Microsoft sides with HTC in fight with Apple
- Apple expected to unveil new iPhone in June
- Apple Buys Company That Helped Build iPad Processor
- Apple Reportedly Takes Over Another Semiconductor Designer.
- Police seize Gizmodo's computers over iPhone prototype
- Double what we thought: over 600,000 iPads sold, says analyst
- iPad Teardown
- Apple posts 11 new iPad videos
- Apple iPad Won't Be Used for Reading, Survey Says
- Apple's Steve Jobs named world's most valuable CEO
- Apple: Survey Finds People Want To Use iPads For Work
- Unlimited Supply of Digital Books for Apple iPad
- Apple Reveals Sweatshop-like Factory Conditions
- Lawsuit stokes Apple, HTC fans' passion
- Compliant Media Help Apple Skirt Child Labor Scandal
- Apple Sues Phone Maker HTC Over Patents
- Apple MobileMe exec chosen as Thumbplay CTO
- Entrepreneur Takes On Apple And Wins $625 Million
- iPad trends may mean sleepless nights for PC makers
- Apple recruits former Microsoft, Mozilla security chief
Dell NOTES | Laptop NOTES | Lenovo NOTES
- nVidia Driver for NVS 4200M GPU
- WINDOWS 7 CLEAN INSTALLATION - THINKPAD T420
- ThinkPad T420 BIOS & Drivers
- Lenovo ThinkPad T420 Manual
- ShouldiRemoveIt.com
- Lenovo SimpleTap (ShouldiRemoveIt.com)
- Latitude E6400 battery - how to get battry status
- Windows 7 on Latitude E6400
- Dell Latitude E6400 - Windows Vista 64bits OR 32bits ?
- Dell Latitude E6400 - Windows 7 64 Bit - Missing Drivers
- Dell E6400 three icon lights - Diagnostic Lights
- CONTROL THE FAN SPEED ON DELL LATITUDE E6400 E6X00 (Hold down fn+shift and type the number 1 5 3 2 4 Release all keys and now hit fn+r )
- Dell Latitude E6400 - Overheating issues with minute tasks such as playing flash videos for extended periods?
- CmosPwd
- Config Password (2006)
- Dell BIOS Password Removal (2005)
- Dell BIOS Password Removal (2004)
- TechSpot
- HP / Dell / etc. laptop password help thread
- Mr. Fix-It Computer Services - PWCrack
- orgot your Windows admin password?
- Latitude_masterpw exe 595b
- Blog of Travis Hydzik
- Dell Config Password
- BIOS Password Backdoors in Laptops - Dogbert's Blog
- Latitude_MasterPW.exe
- Dell Laptop BIOS Password Removal
- cleared the BIOS password on the Inspiron 8100!
- How to Remove the BIOS Password in an Inspiron 8100 Read more: How to Remove the BIOS Password in an Inspiron 8100 | eHow.com http://www.ehow.com/how_7448147_remove-bios-password-inspiron-8100.html#ixzz1m1bjysF8
- Need Dell Inspiron 8100 BIOS password.
- Dell Inspiron 8100 won't boot properly.
- Dell Optiplex GX620 change to Core 2 Duo?
- Apple Turns Back on Windows XP for iCloud
- Dell Optiplex
- Dell OptiPlex 755 Manuals
- Dell BIOS POST error code list
- Dell OptiPlex 755 memory error
- Dell hits ctrl-alt-delete on consumer PCs
- Dell doubles profit to $1.02 billion
Infant NOTES | Baby NOTES | Health NOTES | Parenting Advice
- The Best Compliment a Daddy Can Receive
- Women, it's perfectly normal to be moody
- Parents may be to blame for narcissistic kids, says study
- Help! My teen's watching online porn!
- Infant Dies of Legionnaires' Disease After Water Birth
- Dad Speaks Out After 21-Year-Old Sues Him to Pay College Tuition
- Dad's Conversations About Race: 'Most White Kids Don't Get This Talk'
- Giving Birth Later in Life Is a Sign of Longevity
- Parents are going to prison for a medical diagnosis that may not exist
- Mom Whose Child Died After Catching Chicken Pox Advocates for Vaccines
- Baby hair loss (BabyCenter.com)
- Newborn Hair Care
- BABY SYMPTOM GUIDE
- Graco recalling nearly 3.8M child car seats
- Baby Wipe Ingredient That's Triggering Nasty Rashes
- 17 Ways to Be Happier
- Avacados
- Red Onions
- Green Onion (Scallion)
- Energy Drinks Are Fueling Concerns
- Telomeres
- THE STROLLER GIRL
- Baby's Emotional Reaction to Mother's Song. PRICELESS!!!
- Brooke Greenberg: 20-Year-Old "Toddler's" Legacy of Hope and Love
- Pregnant Woman Files Charges Over Belly Rubbing
- Are USED Baby products safe?
Outlander Sport NOTES - ASX / RVR Clubs | Tesla NOTES | BMW 2 NOTES
- Backup LED license plate light (burtonrider)
- BMW CSL trunk lid on a facelifted sedan?
- How to keep your car battery alive through a long cold winter
- BMW M3 Oil Light to BROKE
- BMW - This means I'm still chasing a vacuum leak? (Use Scotty Smoke Test suggested by JFOJ Post#3)
- BMW Fan Delete MOD (Removing the Mechanical Fan)
- Need BMW valve cover, where to buy? (GREAT PRICE LINKS)
- Rear Fog Lamp Wiring Diagram (Photos)
- (Fender Flares image) Rear Bumper Fog Lamp For Mitsubihi Asx
- Mitsubishi Asx 2010-2012 rear fog lamp ,rear bumper lamp 8337A092 ($39.86)
- BMW Strut/shock replacement... (List of Parts & Prices)
- Thermostat bolt torque setting (10 Nm = 7 ft pounds)
- Successful DIY battery replace, is BMW registration necessary ?
- LANCER RALLIART SPORTBACK OEM AIRBOX INTAKE ($159.94 USED)
- How to Clean a Slippery Leather Steering Wheel
- How to Clean Steering Wheels With Natural Products (warm water & White distilled vineger)
- steering wheel leather cleaning (E46Fanatics)
- How To Clean Your Car Leather Interior
- Leather car steering wheel and shift boot/knob (Instructibles.com)
- Competition promises $10K to hack a Tesla Model S
- Mitsubishi Lancer EX Outlander ASX Hand-stitched Black Leather Steering Wheel Cover (VERY NICE, $27.99 Aliexpress)
- Mitsubishi Lancer EX Hood strut Support rod Suspension bars Studdle Engine Cover Poles 2pcs/set ($57.24 Aliexpress)
- High Quality Mitsubishi ASX steering wheel cover leather wheel cover for Mitsubishi ASX ($19.99+$8.94S&H Aliexpress)
- 2010-2011 Mitsubishi Lancer aluminum Anti-Sway Bar (VERY NICE, $68.42 Aliexpress)
- Real Carbon Fiber Fabrication Near Dallas,TX
- Rear Fog Lamp Wiring Diagram
- ethanol-free gasoline in the U.S. (Pure-Gas.org)
- Is ethanol really more eco-friendly than gas?
- Under Mitsubishi ASX ASX Jin Hyun engine guard skid plate special modified engine protection plate ($41.08)
- Mitsubishi l Hand-stitched Black Leather Steering Wheel Cover ($31.34)
- CARBON FIBER ENGINE COVER FOR MITSUBISHI LANCER EVOLUTION EVO (by JSK Racing)
- Sewing Genuine Leather Car Steering Wheel Cover Stitch DIY For Mitsubishi ASX (ebay $59.99 + $1.99)
- DIY Car Auto Genuine Leather Steering Wheel Cover (ebay $6.75)
- Peel & Stick 3D Carbon Fiber Fabric - Not vinyl [Gold : 50cm(19.68") X 140cm(55.11")] Super Flexible Self-adhesive Fabric - Made in Korea ($24.95 + $2.95Shipping)
- Permatex 22058 Dielectric Tune-Up (Silicone) Grease, 3 oz. Tube : A Super Secret for electronics and rubber products
- Team Associated's "Green Slime". It's silicone based, 100% pure
- USE Silicone Grease around rubber to be Safe - Krytox GPL-203 (Post#2401296)
- DO NOT USE White Lithium Grease on Rubber!! WARNING - Petroleum Distillates Will Damage Rubber
- Oil additives (Fuel additives)
- Wisconsin Auto Supply WGS-283-2 Two Rear Trunk Hatch Lid Gas Charged Lift Supports With Brackets and Studs Without Rear Spoiler ($37.99)
- Wisconsin Auto Supply WGS-272-2 Two Front Hood Gas Charged Lift Supports With 2 Upgraded Studs and Brackets ($36.99)
- Reset Oil Maintenance CEL (Post#14)
- VG Shark Fin Antenna (Ford Fusion)
- ALUMINUM RUNNING BOARD ($169.50)
- Will Mitsubishi go back to it’s roots?
- D360B Dominator Black HitchStep
- NismoShop
- MITSUBISHI LANCER RALLIART CARBON FIBER ENGINE COVER
- Courtesy Nissan Parts Online
- Nissan GT-R Windshield Wiper (VERY DETAILED)
- Mitsu Front Speaker Diagram (illustration)
- Shark ANTENNA ($89.99)
- MITSUBISHI OUTLANDER SPORT SPOILER KIT ($279.95)
- MITSUBISHI OUTLANDER SPORT SIDE WINDOW DEFLECTORS ($79.95)
- MITSUBISHI OUTLANDER SPORT BODY SIDE MOLDING ($179.99)
- MITSUBISHI OUTLANDER B-PILLAR GRAPHIC ($159.95)
- N.O.N Auto Parts - AliExpress (Get Mitsu Parts)
- MITSU PARTS - RALLIART Aluminum Cap Gold $6.18+$7.44S&H, total $13.62
- Mitsubishi ASX Jin Hyun skid plate guard under the engine protection plate ASX dray special modified bottom protection board ($30.47)
- Mitsubishi ASX Jin Hyun Jin Hyun dedicated skid plate modified engine protection plate reinforced titanium alloy material
- Under Mitsubishi ASX ASX Jin Hyun engine guard skid plate special modified engine protection plate
- Mitsubishi ASX hood supporting rod - hydraulic hood strut
- Mitsubishi ASX Engine Shield (VERY Aggressive Looking) - Russian
- Mitsubishi ASX Engine Shield (Better Looking) - Russian
- Mitsubishi ASX ( 2010 - ... ) Engine shield
- Mitsubishi ASX Engine Shield - Russian
- Carbon Fiber Engine Cover for Mitsubishi Lancer EX
- Outlander Sport Audio Install - Door speakers
- Cute girl with Outlander
- Mitsu ROADSIDE ASSISTANCE 24/7
- SURVIVE AUTO CONTEST MALANG
- Rockford Fosgate - 710W Premium 9 Spkr System SPECS
- AUTO FOLDING MIRROR by X-Factor Designs
- Motorized License Plate Bracket
- Mitsubishi Outlander ATS - Ambient Temp. Sensor
- Ambient Temperature Sensor - Outlander - illustration
- Extreme Outlander Sport BodyKit (Prototype)
- Standard gauge for sheet and plate iron and steel (by JEDI)
- FALM series Rectangle Flexible Accent Light Module ($4.95)
- Side Emitting LED Weatherproof Flexible Light Strip - SWFLS series (SuperBrightLEDS.com)
- Outlander Sport ABS, EBD, ASC and other Specs Explained
- Camaro Concept SMD Sidemarkers ($199.00)
- DIY: Easy&Cheap LED Side marker mode...:) - G25Driver.com
- JDM Style Auto Smoke Lens 13 Amber LED Turn Signal Light Blinker Indicator Side Marker For CBR YZF GSX Ninja Sport Racing Bike
- BMW LED side marker lights
- Half Round plastic rods
- Universal Blue LED Side Marker Lights for Car (DC 12V/Pair) SKU:90392 ($5.98 ea)
- MirageForum.com
- DIY Your Own LED Bulbs! Save 25 Watts (or more) LED lights mod (brake, tail, side markers, plate, etc.)
- Planet-9.com : Porsche Forum
- Modified-led-sidemarkers Porsche Cayman S
- How to remove side mirror glass (illustration)
- carpartswholesale (ebay score 1,189,701 - 99.3%)
- JDM MITSUBISHI LANCER CN9A EVO 4 5 6 BLACK FOLDING SIDE MIRROR (ebay $160, used)
- FORCE Performance Turbos - McKinney, TX
- ECU UPDATE RECALL for DIESELS ASX models - FEBRUARY 2014
- 2015 ASX Concept (Post#13491)
- ASX Owners Club UK forum
- How to Remove Side Mirror Glass (VERY HELPFUL)
- Door Sound Dampening - Outlander Sport by TStewartFan (Post#170)
- OEM REPLACEMENT IN-DASH RADIO DVD GPS NAVIGATION HEADUNIT FOR MITSUBISHI OUTLANDER WITH REAR VIEW CAMERA
- Speed-sensitive door locking (Auto Locking Method) - ASX Owners Club
- OBD2 Mitsubishi ASX / RVR / Outlander Sport (VIDEO)
- Super Mini ELM327 V1.5 OBD2 OBD-II Bluetooth CAN-BUS Auto Diagnostic Tool for Windows XP, Vista, Win7, OSX and Android
- How to reset the mileage counter for service inspection (Post#9)
- EVOScan
- The Definitive Sound-Deadening Thread!!! (EvolutionM)
- 97-01 MITSUBISHI LANCER EVO FOLDING ELECTRIC DOOR MIRROR SWITCH BUTTON
- KasKus - Largest Indonesian Community of Outlander Sports
- Outlander Sport DRIFTING Video
- Outlander Sport DRIFTING - Post#195
- Outlander Sport Hood Struts/Dampers & Euro Style Rear Taillights (Audi Type)
- Hay for oil spill soak up!
- Can you clean oil-soaked swamps? This craft is going to try
- How one magic cloth could clean up the Gulf oil disaster
Gulf of Mexico - Worst Oil Spill - BP | Other US Oil Spills
- Rare video: Mayflower oil spill disaster zone in Arkansas.
- Breaking News | Mayflower Oil Spill.
- Thank You Exxon: Mayflower, Arkansas' New Oil Lake.
- Tar Sands Oil Extraction - The Dirty Truth
- What Exxon Doesn't Want You To Know About The Arkansas Oil Spill
- Exxon Major Oil Spill, Pipeline Spill Mayflower Arkansas.
- AMAZING Aerial Footage of Arkansas Exxon Oil Spill!
- Mayflower, meet Exxon: When oil spilled in an Arkansas town (April 1, 2013)
- U.S. blames BP for Gulf spill
- Radioactive BP Oil – Methane is a Sign of Uranium and Thorium Decay – Ultra Toxic Oil
- Tests warned of cement troubles before BP blowout
- BP attorney suggests that the oil giant might seek to cap spill claims at $75 million
- Gulf oil well is dead but the pain will remain
- Blown-out BP well finally killed at bottom of Gulf
- BP report blames itself, others for oil spill
- Major study charts long-lasting oil plume in Gulf
- Oil, price worries as La. shrimpers start season
- Gulf of Mexico Oil Spill - Google Maps
- Well capping brings relief but fear of abandonment
- Spill investigators want to find undersea evidence
- BP taps new American CEO, reports $17 billion loss
- Tony Hayward leaving as BP CEO, US official says
- BP oil leak could be world-killing scenario, scientists say
- BP claims progress on new cap as oil spews in Gulf
- New cap, ships could contain Gulf leak by Monday
- Oil seeps into New Orleans' Lake Pontchartrain
- Oil's fingers reach into Louisiana's inland waters
- World's largest oil skimmer positions in Gulf
- World's largest oil skimmer heads to Gulf spill
- Gulf beaches hit as distant hurricane pushes oil
- Oil Spill 'Too Much' for Skipper Who Killed Self
- Suicide of fisherman 'distraught at spill'
- Hey, BP — this giant funnel might be the answer
- Gulf rig owner criticizes Obama's drilling halt
- Two months later, the Oil still pollutes many (Photo Proof)
- BP Gulf spill costs hit $2 billion, no end in sight
- Crews drill deep into Gulf of Mexico to TRY to halt leak
- For proud BP employees, Memo tells them to Hide
- Embattled BP CEO removed from spill oversight
- Gulf oil leak video could haunt Obama
- Gulf oil full of methane, adding new concerns
- BP oil exec accused of 'kicking can down the road'
- At spill hearing, BP CEO oblivious to safety
- Sea creatures flee oil spill, gather near shore
- BP agrees to $20B fund; chairman apologizes
- BP cut corners in days before blowout
- New oil spill total is bad news for BP, wildlife
- BP buys search term "oil spill" from Google
- Gulf Coast Oil Leak Live Video Feed From BP
- 'Furious' Obama heading to Gulf for spill update
- Cap collects some Gulf oil; crude washes into Fla.
- Nuking the oil spill, a 'crazy' plan that's gathering steam
- 8 technological failures behind the oil cleanup
- Effort to contain Gulf oil stalls with stuck saw
- BP stock tumbles as feds announce oil-spill probes
- BP's top kill effort fails to plug Gulf oil leak
- Tar balls and promises: Obama visits Gulf Coast
- Gulf leak eclipses Exxon Valdez as worst US spill
- BP says doing all it can, everyone's frustrated
- Inventors say BP ignoring their oil spill ideas
- Obama pledges permit review, end to cozy oil links
- BP tries tube to siphon spewing Gulf oil to tanker
- What went wrong at oil rig? A lot, probers find
- Oil spill testimony to Congress: Not our fault
- FAIL-ed! Big Box casted aside!
- Bubble of methane triggered rig blast
- 1st - Gulf oil spill swiftly balloons, could move east
Toll 800 877 to watch out for | Reverse # Lookup
- 240-324-6319 (Security System Cold Call Sales)
- 916-527-2625 (CMRE Financial Services)
- 253-275-3705 (CMS Services)
- 877-466-3200 (FRAUD - Extended car warranties)
- 214-452-2650 (cRME financial creditors )
- 385-229-3204 (SCAM, Scratch off Offer - Federal Financial, IMF)
- 732-918-9299 (Dealer Services - SPAM, tries to sell you 3rd party extended warranties)
- 214-269-1275 (Home Depot Remodeling)
- 214-613-0539 (American Asset Recovery - Debt Collector)
- 609-232-8938 (SCAM selling Alarm Signs)
- 800-868-0203 (from Mitsubishi motors Experience Review)
- 972-398-3682 (supposed credit card processing company ? FISHY to say the least)
- 855-294-4857 (Car Dealer / Service Review)
- 214-769-8034
- 214-613-0542 (CMRE Medical Debt Collection company)
- 972-280-7286 (Correctional Facility SCAM)
- 1-800-483-8314
- 800-483-8314
- 888-217-3212 (SCAM Collections)
- 214-613-0542 (CMRE Financial Services - Medical Bill Collectors)
- 682-888-5226 (Auto insurance SCAM)
- 855-294-4857 (Company that does Quality surveys for vehicle dealerships)
- 866-297-6863 (Sirius Satellite Radio Subscription Renewal)
- 214-613-0547 (
- 682-888-5226 (SCAM! - Auto Insurance Scam)
- 817-803-4620 (SPAM/Robocall - car insurance)
- 125342c454 (125-342-9454) - some kind of “spoofing” deal. How to BLOCK > Answer Found!
- 832-529-4184 (Telemarketing for Auto Insurance in Texas)
- 801-528-9741 (Telemarketing in Utah)
- 888-867-8032 (Mitsubishi ?)
- 972-705-5291 (Eligibility Consultants to a hospital)
- 385-229-3020 (Financial Group SPAM???)
- 972-581-1600 (Progressive Claim)
- 469-995-8728 (Insurance SPAM)
- 940-594-2449 (Don Herring ?)
- 214-473-9000 (Devega Louie - State Farm Agent in Plano, TX)
- 631-881-0721
- 469-241-9038 (Professional Indus Contrs LLC - Plano, TX)
- 954-326-7207 (Spam Link)
- 385-229-3020
- 480-366-3333 (Godaddy domain renewal notice, Leggit)
- 253-245-2707 (Scam)
- 866-796-6124 (car dealer survey)
- 360-460-5570 (Cruise scam)
- 206-276-8396 (Cruise scam)
- 206-200-6011 (telemarketer - Cruises)
- 206-276-8704
- 360-460-7730
- WhoCallsMe.com
- 253-246-8553
- 480-505-8859 (GoDaddy scam?)
- 813-899-1569 (leader scam)
- 360-461-3770 (scam)
- 360-461-4559 (scam)
- 253-246-8553 Sales/Marketing Call (Location: Washington - Kent, Tacoma)
- 360-460-1404 (advertisement)
- Reverse Number Lookup (972-682-) Verifyphone.com
- 360-565-6645 (There is a ship's horn when you answer)
- 877-391-5317 (Labor Law Posters)
- 360-474-3914 - Seattle, Washington (Political Survey Spam Call)
- 360-477-5624
- 360-460-9278 (possible Travel Services Fraud)
- 713-786-1256 (Houston area code - possible car dealer followup)
- 509-209-7549 (sells Health Insurance?)
- 713-275-3575 (Car Dealer - Cold Call)
- WhoCallsMe.com
- 253-312-7757
- 402-930-3659 (Letter Requesting to be removed)
- 6513301547
- 469-241-9870 (State Farm Cold Calling - Auto Insurance)
- 877-350-7827 (selling work posters)
- 702-534-4271
- 503-354-4632
- 202-827-9981
- +00524286850998.
- 202-480-5620
- 866-213-9593
- Chinese Toll
- Directory of 1866 area code phone numbers
- 866-923-5191
- 888-202-1283
- 813-899-1569
- 877-321-4144
- 813-899-1569 (leader scam)
- 855-294-4857 (Car Dealer / Service Review)
- 773-945-5684 (Robocall about home security systems)
- 206-858-8279 (No voice SPAMMER)
Toyota RECALL | Honda RECALL | Ford RECALL | GM RECALL
- Honda expands US airbag recall to 6 Million
- GM ordered 500,000 switches for defective cars months before recall !!!
- Massive Takata Airbag Recall: Everything You Need to Know, Including Full List of Affected Vehicles
- GM Sued for $10 Billion Over Losses on 27 Million Cars (Oct. 15, 2014)
- Stop-Sale Order Issued For 2015 Chevrolet Corvette
- Ford Crown Victoria faces investigation over jammed steering
- GM recalling 8.4 million Malibus, Grand Ams and others for key flaw linked to 3 deaths (June 30, 2014)
- GM halts most Chevy Cruze sales (March 28,2014)
- Families want answers in GM crashes
- 10 Things You Need to Know About the Massive GM Recall
- GM recall 1.6 million cars involving faulty ignition switches
- Toyota recalls 1.9 mn Prius cars worldwide
- Ford recalls 2013 Escape SUVs for seventh time!
YouTubers | Vimeo | Photography
- RHS Bellydance - Kenna Emert
- Arabian Belly Dance - This Girl is insane!
- Belly Dance Nataly Hay
- HOT CARS & HOT GIRLS at Miami Dub Custom Auto Show 2013
- Bongos Cuban Cafe 02-11-2012
- Hot import night Miami HOT CARS & HOT GIRLS
- The Models of SEMA 2013
- Rosa Wang Photography The Fine Art of Photography.
- TacticalAdv
- Helen Rodriguez (Spanish name but Russian?)
- Fast and Furious 6 Car Meet 50+ Car Turnout (by SmurfinWRX)
- BikiniModelFitness
- sexy stretch girl
- flexy girl (flexible)
- Diana - Sky Diving in Aruba
- We need one of these for our E46 (VIDEO) - dubstep or skrillex
- Fantasy Erotica – Medieval Girl Nude
- Lindsey Stirling and Pentatonix (Imagine Dragons Cover) - Radioactive
- Evil Star Productions - Vivian
- Träningstips - Extrem mage (aka MyranderAndrea)
- FITNESS GIRL | BIKINI WORKOUTS (aka CzechFitnessGirl)
- Canal de mikedete (Beautiful Dancers)
- The Night is Darkening Around Me ~ Emily Bronte
- jschroeder10022 = Burtonrider1002 (from evolutionm.net)
- Gymnastics Girl - Someone should tell this girl that this can't be done!
- nukem384 - Auto Tutorials
- Chinese News by BJCream
- Being a mermaid (ENGLISH VERSION SUBTITLES - Season 1 Episode 1)
- 17 year old-girl performing movements most guys can't do (AMAZING!!! by CrossFitBergen)
- Stairway to Heaven - Led Zeppelin (Harp Twins) Camille and Kennerly, Harp Duet
- Camille and Kennerly - The Harp Twins
- Super Automobiles Blogspot
- Awesome Sauce Lifestyle
- Models In the Trunk (MITT)
- Chick Shooting the Massive 45-70 Rifle Powerful Recoil
- Erika shooting the AR-15
- Tentacle Armada (Asian girl anime figures dolls)
- Tadashi Mori Origami Channel
- Heartshaped nipples?
- The Parable of the Sheep by Charles Riggs
- Quitting My Job!!!! - iPhone 5 Front Camera Confession (TheAngelofmusic1989 aka Erica Griffin)
- Corey Vidal - ApprenticeA Productions
- Ruben Garay - HollywoodBubbleInc
- Numbers and Counting in Spanish (by Professor Jason aka: languagenow )
- Russian Road Rage and Accidents October 2012 [18+] ☆ SFB (Crazy Driver | Crazy Driving)
- Yoga for Beginners : Head-to-Knee Forward Bend
- Sophia Kaloudis and Christina Kaloudis - Talented dance sisters (extreme girl abs)
- Yoganidrasana, Both Legs Behind the Head in Ashtanga Yoga with Kino (Extreme YOGA)
- Jeremy Campbell (Projectionist at Venetian Theaters in Carrollton, TX) First YT commercial production
- Christinia
- Yoga Undressed
- Asian Girls Teach You Full-body Massage Therapy
- Hottest girl who sales cars VIDEO
- How to know if a girl likes you
- QueenSahperia
- FreakinRad (Halo guys)
- ChinaGarage (My copycat competitor)
- Range Time with Cory & Erika
- Why Girls Don't Fart...
- Extreme Movie-Fart Scene
- Jesse Pinkman: Ever Since I Met You [Breaking Bad]
- Molotov Cocktail in Slow Motion - The Slow Mo Guys
- Mercedes woman leaves without handbrake, and is nearly run over by his own car
- Cars And Coffee Houston 9/4/10 Vette Spinout (Corvette Spinout)
- U.S. Soldier Survives Taliban Machine Gun Fire During Firefight (VIDEO)
- Funker530 - Raw Combat Footage Documentation
- SMD - Steve Meade : Extreme BASS
- Discovery Channel Stopped By - You Have Been Warned - Tremendous BASS! (Teaser)
- In Descent Proposal - Ryan Thompson
- EyeHandy
- How-To Field Strip and Clean a Glock With Ashley
- 9/11 The Falling Man : documentary
- To use Youtube in FULL Browser mode without windowing (http://www.youtube-nocookie.com/v/40gECrmuCaU)
- PyroBooby : Davin Tong aka Peter Chao
- Monkey's Fist - How to Tie it and Practical Applications
- SelfMadeSailor (Tie knots)
- GardenFork.tv
- Gut-wrenching video shows South Korean Olympic weightlifter’s gruesome elbow-snapping injury
- Ken Block Gymkhana Car Build & Drive - How it's Done
- Krysten Ritter Online's (KrystenRitterOnline)
- Netflix - An explanation and some reflections - PR video FAIL
- SUV (car vehicle) goes airborne from heat buckled highway in Wisconsin
- Liv Films
- Debra Romer, 21 ~ America's Got Talent 2010, auditions Chicago
- Michelle L'amour - The 1st Annual New Orleans Burlesque Festival
- Randy Beard (Waterwall)
- KevinYong Flickr photos
- [KEVINYONGPHOTO] | A Ferocious Matte ZR1 Corvette By SR Auto Group (Kevin Yong)
- YouTube Q&A Part 2 : Working With Networks (PaintballKitty, Look @ 13:30)
- The Making of Ephemicropolis (Staple City)
- badlands (Quadcopter)
- Toy Thailand
- Seriously Hot Yoga
- Brazilian Home Waxing
- TRANSPORTBLOG
- Girls defy death at Victoria Falls! Devil's Pool, Livingstone Island, Zambia
- 3 Muscle Building Diet Tips (aka Six Pack Shortcuts)
- My Home Back Workout - Mike Chang (aka Six Pack Shortcuts)
- Six Pack Abs (aka Six Pack Shortcuts)
- Top 3 Ripped Body Exercises.
- Devin Super Tramp
- Devinsupertramp BTS
- Peter Hollens - Music
- Skyrim- Peter Hollens & Lindsey Stirling.
- Lindsey Stirling (aka LindseyStomp)
- TeslaCommander (aka MegaVolts) - Ultra Capacitor Bank YT : AWESOME!
- ElectricFormula - Capacitors YT (electricformula.com- Dead Site?)
- patrickikis - Electronics YT
- CZECH FITNESS GIRL - Macho Doll
- Sexy Bikini Yoga Workout
- HOT YOGA WORKOUT- Sexy Backbend Exercise.
- Jessica Sanchez - I Will Always Love You - American Idol 2012 (Top 13)
- CNetSystemsPCSupport
- Stan Winston School
- Sofia Vergara yellow thong bikini
- World's Greatest News Anchor
- Chinese Girl
- the most amazing singer, and she's only 15!
- GrandPrixGTP02 (Great Car Introductions)
- Aatma Studio
- 人気レースクイーンのセクシー洗車【洗車~テインメントSP】
- Beautiful girls ... and cars at the 2011 Frankfurt Auto Show
- BMtroubleU
- Cara Castronuova Boxing Video
- CARA CASTRONUOVA Segment PART ONE The History Channel's "Warrior Women".
- PART TWO The History Channel's "Warrior Women".
- RawFitBitch.com
- How to get a flat stomach. Freelee's top tips
- RawFitBitch : Youtube
- Asian Bodybuilders
- There's a One Train Runnin' at Midnight
- bikini slowmotion.
- BodyRock - Zuzana
- Stella Angelova Super slow motion - Ninja Sword
- Laura Tickled
- aussfx
- Pole Dance Тюмень Лейла Студия танца And - танец на пилоне.
- SoldierKnowsBest
- Miss Tuning Calendar 2012
- Bahara Golestani interview (wow)
- ChinaOnTV.com
- Cancun Resorts - HotelsCancun
- Sexy model photo 08 (Youku.com)
- HIP HOP 4.
- PiMP Daily Dose
- iPhone 5 Concept Features
- Blacklight Flashlight Hack! Nasty stain locator!
- Asian girls of NP models getting wet and wild - BMW
- Asian Girls
- Asian Bikini Girls Psycedelic Trance Dance
- miss A - Good-bye Baby
- REDKE71
- The Sword and the Sorcerer 1982
- Net Use - Video How to
- CareerIgniter
- DFWCowboys - Youku
- NicoleChen.NET
- UltraPrettyGirls
- romanian girls Nicoleta with BMW M6 hot shoot bucharest
- npgirls 2
- npgirls
- BikeBabes
- MrKillthecar
- Seriously Hot Yoga
- Randy Beard (Waterwall)


{kind=link}
{kind=link}
{kind=link}
{kind=link}
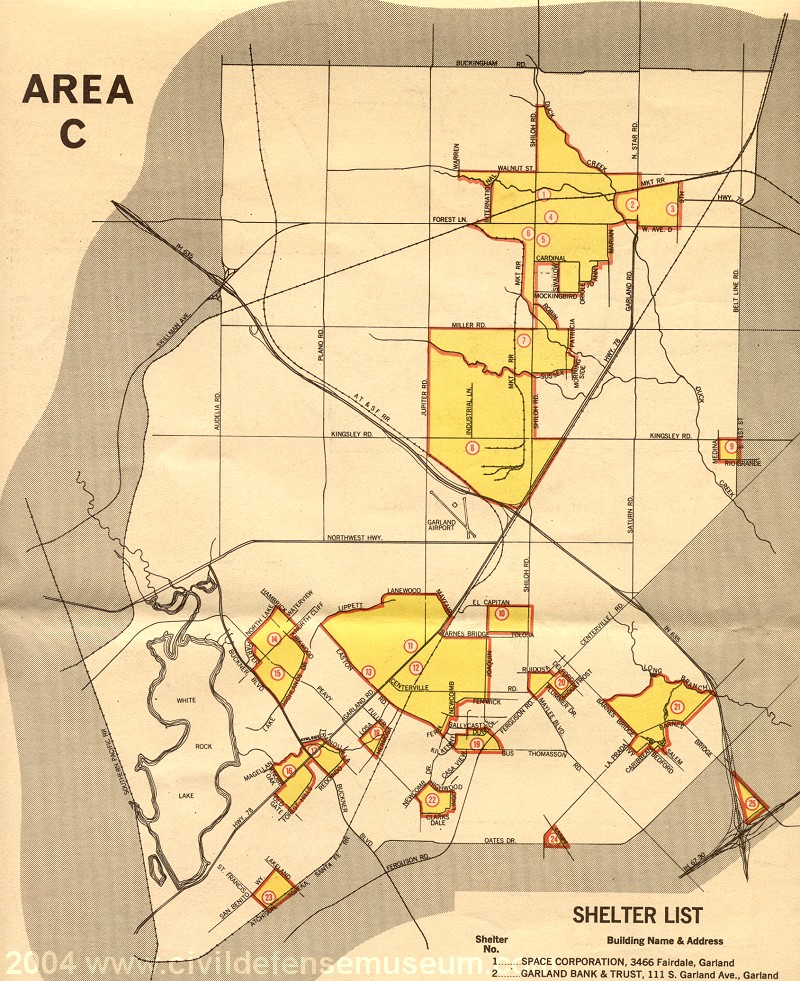{kind=link}
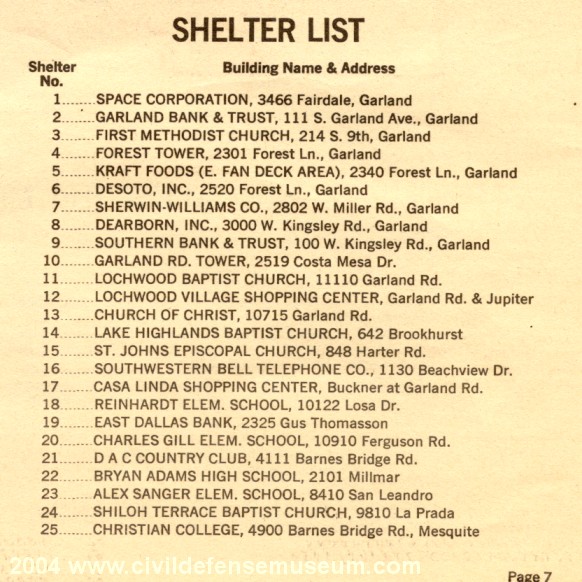{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}